Kinova-kortex2_Gen3_G3L
KINOVA KORTEX™ API Reference
Description
The official repository contains documentation and examples explaining how to use the KINOVA® KORTEX™ API client with C++ or Python. The repository has been tested on Windows 10, Ubuntu 16.04, Ubuntu 18.04 and Ubuntu 20.04.
Table of Contents
- Description
- Licensing
- Role of Google Protocol Buffer in KINOVA KORTEX™ API
- Download links
- Build and Run instructions
- Reference - Useful Links
Licensing
This repository is licenced under the BSD 3-Clause “Revised” License
Role of Google Protocol Buffer in KINOVA KORTEX™ API
The KINOVA KORTEX™ API uses Google Protocol Buffer message objects1 to exchange data between client and server.
Google Protocol Buffer offers structured data objects with standard methods for each member field:
- structured, nested objects
- basic types and collections
- getter/setter methods on basic types
- iterators, dimension and appending methods on collections
- many helpers (e.g. serialize/deserialize, I/O functions)
When using the KINOVA KORTEX™ API a developer will need to understand the Google Protocol Buffer feature set to maximize their efficiency.
Quick Start for C++ users
The following links provide some helpful guidance for C++ developer. You will find information about KINOVA KORTEX™ mechanism and some code examples.
- API mechanism
- Transport / Router / Session / Notification
- Device routing
- Servoing modes
- Error management
- Examples
Quick Start for Python users
To run the Python examples you will need to install the Python interpreter and the pip installation module.
Note that for C++ developers it could be useful to install the Python KINOVA KORTEX™ API to allow for quick tests and validations.
Here is some general information about the Python interpreter and the pip module manager.
- Python General Information
- API mechanism
- Transport / Router / Session / Notification
- Device routing
- Servoing modes
- Error management
- Examples
Quick Start for modbus users
Since release 2.3.0, the KINOVA KORTEX™ API offers a modbus interface to communicate with the robot.
All the data is formatted according to this:
- byte order: Big endian
-
word order: Little endian
- Modbus ICD
- Modbus examples
Download links
The latest download links for each arm type are reported in the table below:
| Arm type | Firmware | Release notes | API |
|---|---|---|---|
| Gen3 | 2.8.0 | 2.8.0 | 2.8.0 |
| Gen3 lite | 2.3.4 | 2.3.4 | 2.3.0 |
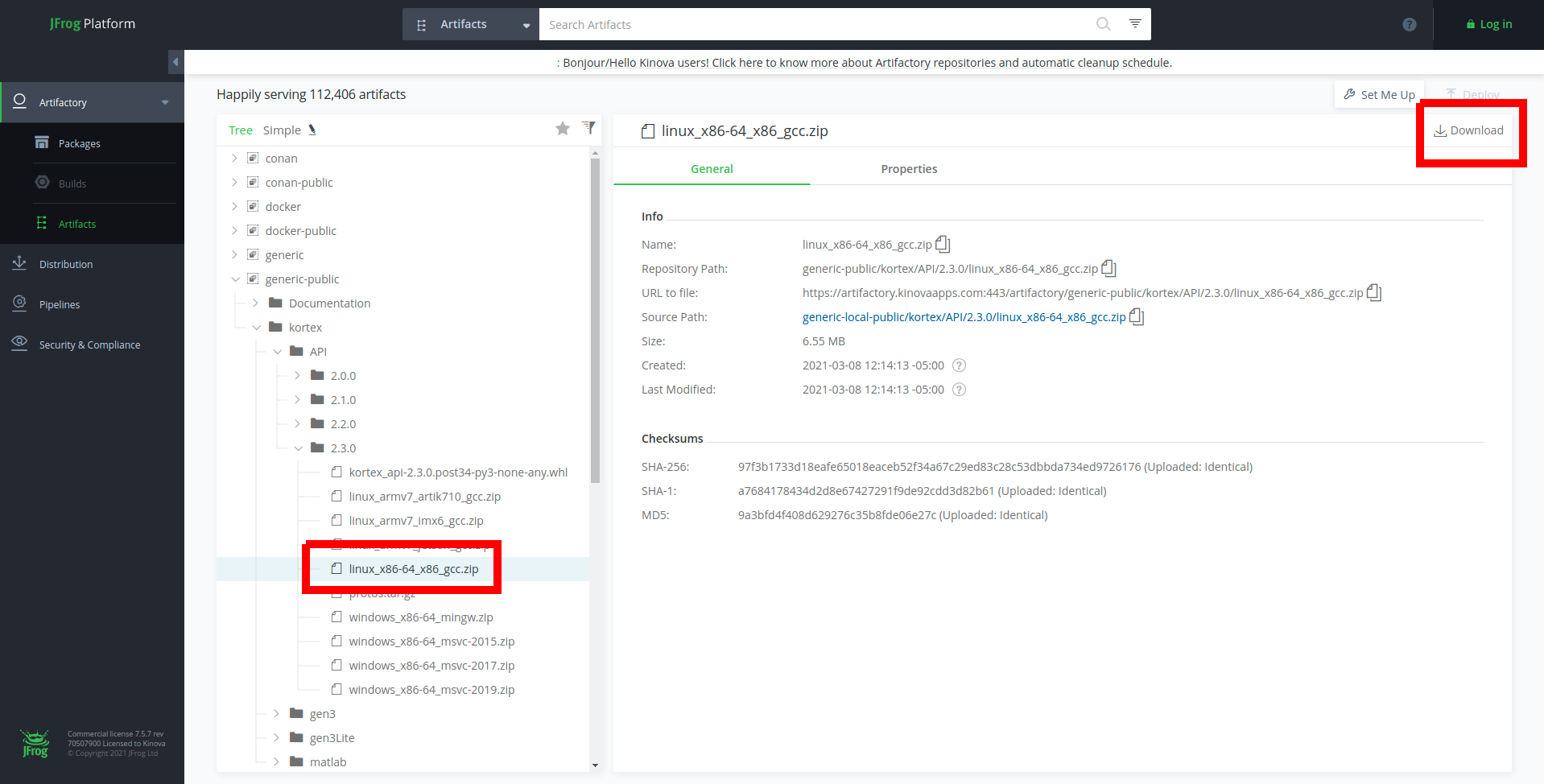
When following the link to Artifactory, to download the correct C++ API, you have to select the package for your architecture on the left-hand side tree view and then click Download on the right-hand side:
Previous releases
- Release 2.5.2 for Gen3: Firmware, Kortex API
- Release 2.5.0 for Gen3: Firmware, Kortex API
- Release 2.3.2 for Gen3 lite: Firmware, Kortex API
- Release 2.3.1 for Gen3 lite: Firmware, Kortex API
- Release 2.3.0 for Gen3: Firmware, Kortex API
- Release 2.2.0 for Gen3: Firmware, Kortex API
- Release 2.1.1 for Gen3 lite: Firmware, Kortex API
- Release 2.0.1 for Gen3: Firmware, Kortex API
- Release 2.0.0 for Gen3: Firmware, Kortex API
Build and Run instructions
Reference
Useful Links
| | | | —: | — | | Kinova home page: | https://www.kinovarobotics.com| | Google Protocol Buffers home page: | https://developers.google.com/protocol-buffers |